a tradičním atrakcím Prahy – v provozu je od konce 19. století. Již v roce 1891 totiž po Petříně jezdila lanová dráha s vodním pohonem. V třicátých letech byla lanovka elektrifikována, stala se z ní tak jedna z nejmodernějších lanovek v Evropě. Po sesuvu půdy v roce 1965 byla lanová dráha dvacet let mimo provoz, ale při příležitost spartakiády v roce 1985 byla opět zprovozněna.
V roce 2008 naše firma provedla zatím poslední rekonstrukci LDP, a to rekonstrukci řídícího systému a vizualizace provozu lanovky.
Stručná historie lanové dráhy
Lanová dráha je tvořena dvěma vozy spojenými lanem. První lanová dráha měla pohon vodní, vozy se pohybovaly díky převaze vody, která se napouštěla do vodojemu hořejšího vozu. Pro dostatečnou hnací sílu bylo třeba do vozu načerpat až 5,5m3 vody. Ve spodní stanici se voda automaticky vypouštěla záklopkou.
V roce 1930 bylo rozhodnuto o elektrifikaci lanové dráhy. Lanovka s elektrickým pohonem zajištěným Ward-Leonardovým soustrojím vyjela poprvé v roce 1932. Třífázový motor lanovky poháněl dynamo pro pohon motoru lanové dráhy o napětí 500V, výkonu 150kWa rychlosti 750ot/min.
Pohon s Ward-Leonardovým soustrojím byl využit i při rekonstrukci při obnově provozu lanové dráhy v osmdesátých letech 20. století firmou ČKD Praha, motor soustrojí byl však převinut z 500V na 380V. Informace z vozů lanové dráhy byly přenášeny radiově do velínu obsluhy.
Během devadesátých let došlo ke změně v napájení pohonu. Ward-Leonardovo soustrojí nahradila firma PEG spol. s r.o. polovodičovým reverzačním měničem.
strojovna
Řízení lanové dráhy
Systém řízení lanové dráhy prošel v roce 1996 rekonstrukcí, kdy bylo původní reléové řízení firmy ČKD Praha nahrazeno řízením pomocí logického automatu. Řídící automat byl spojen po sériové lince s ovládacím PC, na kterém běžel ovládací program. Toto řešení nabízelo vyšší komfort obsluhy a lepší možnost ovládání celého provozu lanové dráhy.
Po dvanácti letech provozu tohoto systému bylo třeba přikročit k jeho náhradě, neboť systém se stával morálně a technicky zastaralým, a to zejména z těchto důvodů:
Systém jako celek vykazoval vyšší poruchovost a tím nižší spolehlivost provozu
Ovládací program LD byl vytvořen pro MS-DOS, což limitovalo možnosti použití nových hardwarových a softwarových prostředků pro ovládací PC
Vzhledem ke stáří technologie řízení bylo stále obtížnější zajištění náhradních dílů
řídící systém - výstroj rozvaděče
Náhradu řídícího systému je tedy možno rozdělit do následujících částí:
Výměna řídícího PC za nový, rychlejší, výkonnější a celkově moderní stroj, s plným vybavením dle dnešních nároků na hardware a software a s možností budoucích vylepšení a rozvoje.
Náhrada stávající obrazovky za LCD obrazovku 24“
Náhrada řídícího automatu za nový, modulární
Vybavení systému řídícím a ovládacím software na klíč
Zachování návazností na další stávající technologie lanové dráhy
Poruchová ochrana provozu
Řídící program technologie je doplněn samostatným softwarovým blokem poruchové ochrany. V poruchové ochraně lanovky je definováno na šedesát různých poruch, při jejichž vzniku celý systém zareaguje tak, aby porucha měla minimální následky na provoz a bezpečnost zařízení.
Při vzniku poruchy jsou jednotlivé chyby vypsány do tabulky, v uspořádání podle času, kdy vznikly a aktuálním stavem. Tento způsob umožňuje rychlou orientaci ve stavu zařízení a detekci části zařízení s poruchou.
Softwarový blok poruchovky samozřejmě umožňuje pokročilou správu jednotlivých poruch (nastavení jejich parametrů, typ zásahu do zařízení při vzniku poruchy apod.).
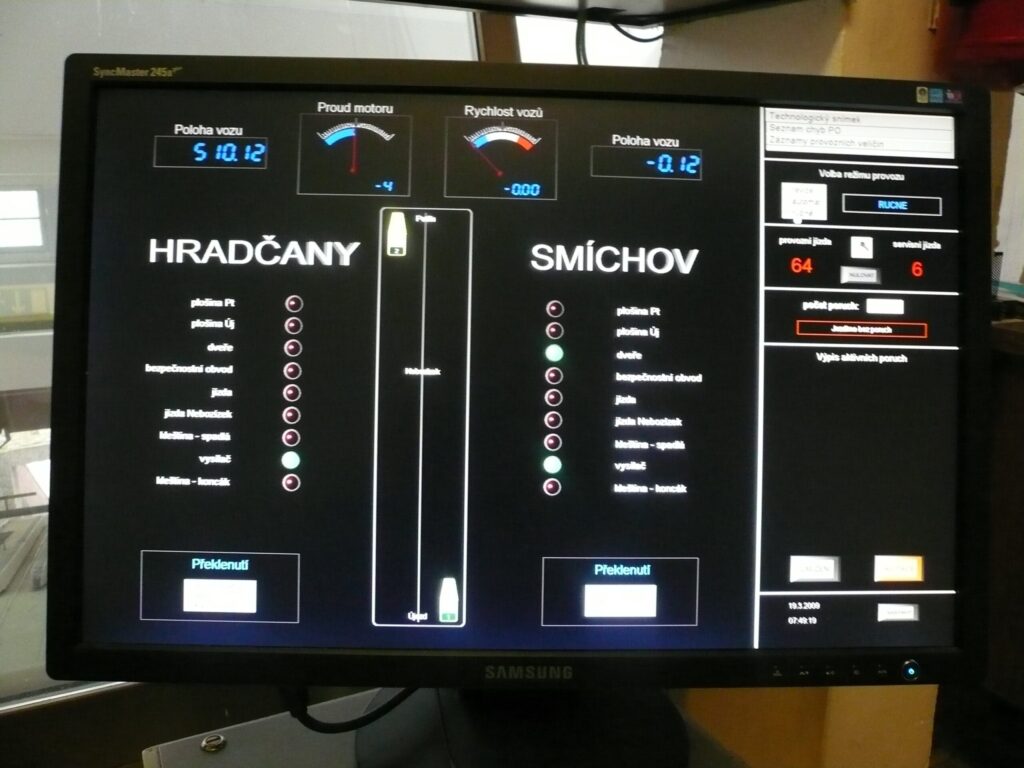
stanoviště strojníka - vizualizace provozních stavů a veličin
Vizualizace
Vizualizační a ovládací software je spuštěn na stolním PC strojníka. Komunikace s řídícím automatem probíhá po lince Ethernet, softwarově pomocí OPC serveru. Program vizualizace je vytvořen v prostředí ControlWeb 6.
Program vizualizace je vytvořen v prostředí ControlWeb 6. Ovládací program slouží k zadávání režimu jízdy, sledování aktuálních provozních stavů a ke správě bloku poruchové ochrany. Dále je zde umístěna informace o počtu jízd, grafické zpracování analogových jízdních veličin a archiv vybraných informací.
Závěr
Lanová dráhy na Petřín je vybavena v současné době moderním řídícím systémem s celou řadou sofistikovaných funkcí, které vedou k vyšší bezpečnosti provozu, vyššímu komfortu obsluhy a v neposlední řadě k rychlé a přehledné diagnostice případných poruch.
Veškeré hardwarové i softwarové vybavení je plně standardizované a je v budoucnu v případě potřeby rozšiřitelné dle požadavků provozu. V úvahu přichází např. dálková správa systému z nadřazených míst, popř. archivace většího počtu událostí nebo úkonů.